Showcases
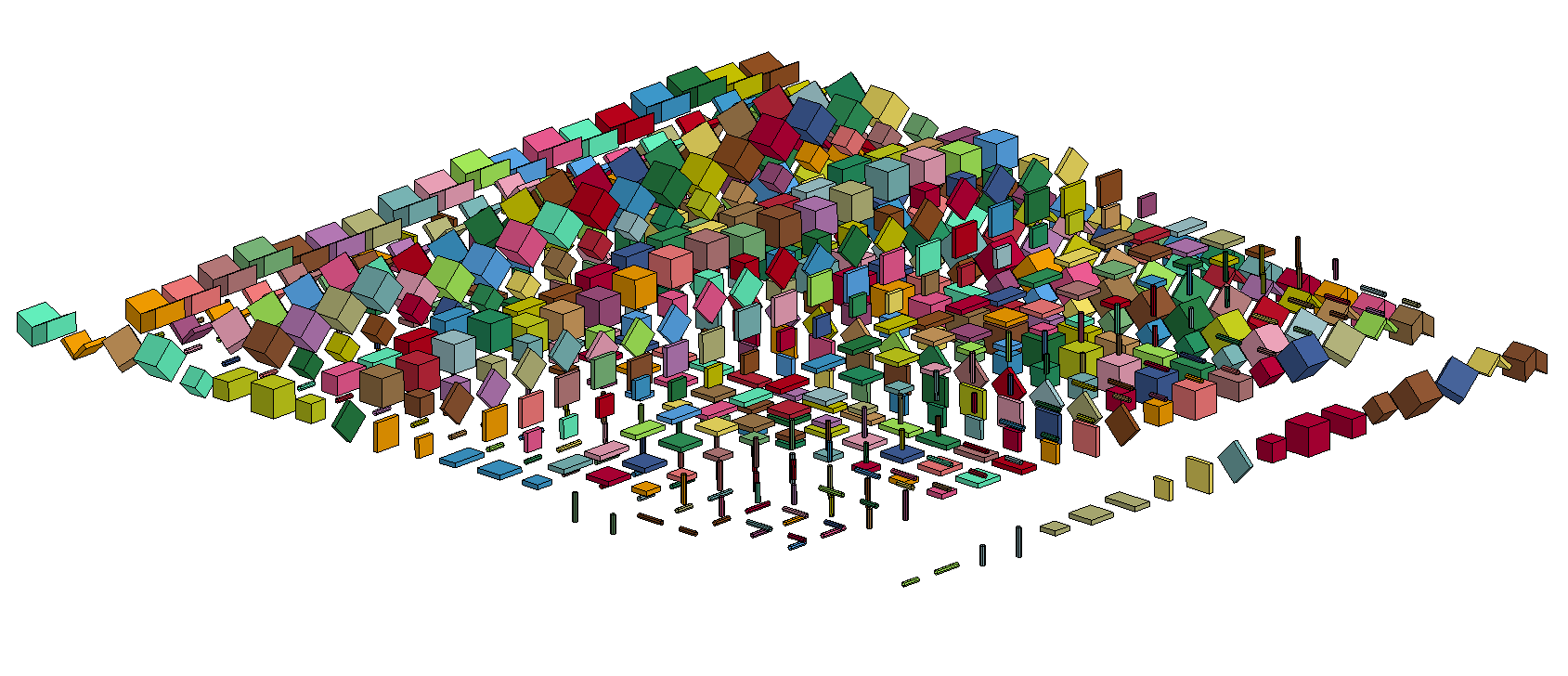
Contact Overview
Example showing various contact cases in LS-DYNA
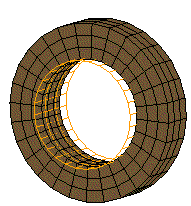
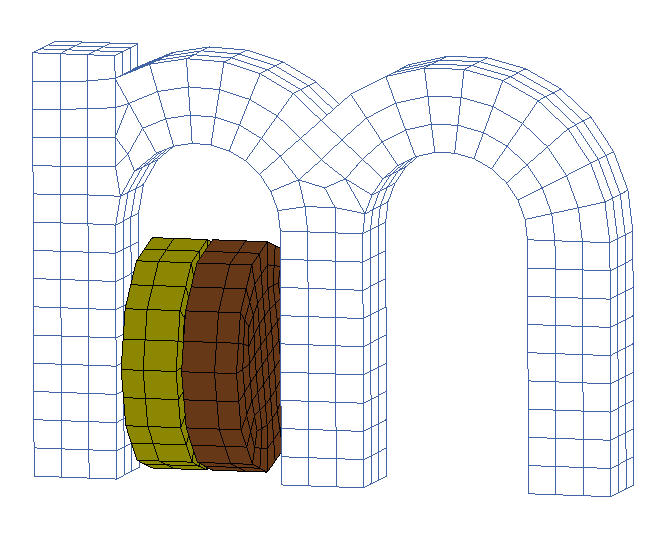
Contact Interference
Example showing the use of a contact interference definition to depenetrate and pre stress a solid ring initially penetrating a rigid shell cylinder.
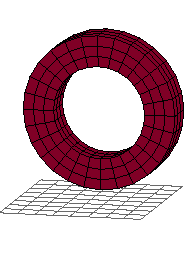
Drop Test
Example showing a drop test load case. A deformable body is dropped on a rigid wall.
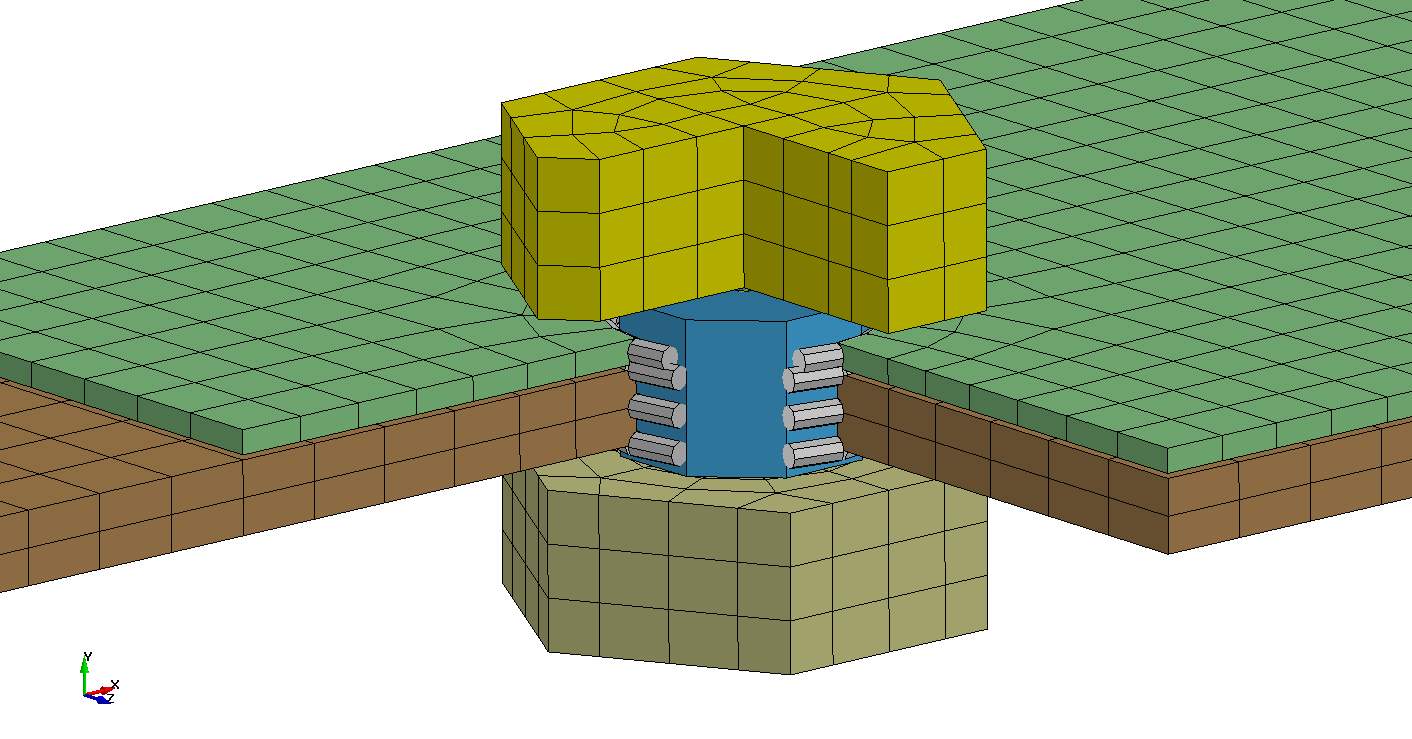
Joint Screw
Example showing the use of a screw joint definition between rigid bodies. This option can be used to transfer a rotational into a translational motion.
Joint Rev/Trans
Example showing the use of a revolute and a translation joint definition between two rigid bodys. This option can be used to constrain the motion of rigid bodys.
Preload
Example showing the use of dynamic relaxation to preload a system with a force.
Bolts
This section will go over common bolt types and things to keep in mind while modeling bolts.